Ev-3DOD: Pushing the Temporal Boundaries of 3D Object Detection with Event Cameras
Jun 1, 2025·
,
Hoonhee Cho*
Equal contribution
,Jae-Young Kang*
Equal contribution
,Youngho Kim
Kuk-Jin Yoon
Advisor
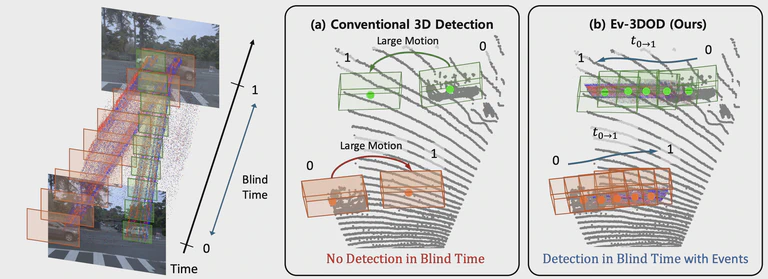
We propose Ev-3DOD, the first event-based 3D object detection framework that leverages the high temporal resolution of event cameras to detect objects even during the blind time of conventional LiDAR and RGB sensors.